|
|
You are here: GSI Wiki>TOS/Timing Web>TimingSystemDocumentation>TimingSystemHowTo>TimingSystemHowUniChop (2025-07-17, TobiasHabermann)
How-To: UNILAC Chopper - Firmware and Monitoring
Introduction
The main documentation about the (new) UNILAC chopper can be found here. This how-to describes the lm32 firmware and related monitoring, a dedicated documentation can be found here. This tool only serves to write 3x 16bit data to the UNILAC Choppersteuerung in hard real time. This is initiated by a host system application and executed by a lm32 firmware in the FPGA.Monitoring
A simple monitoring app is available via Launcher -> Entwicklung -> 'Emergency Chopper Monitor'.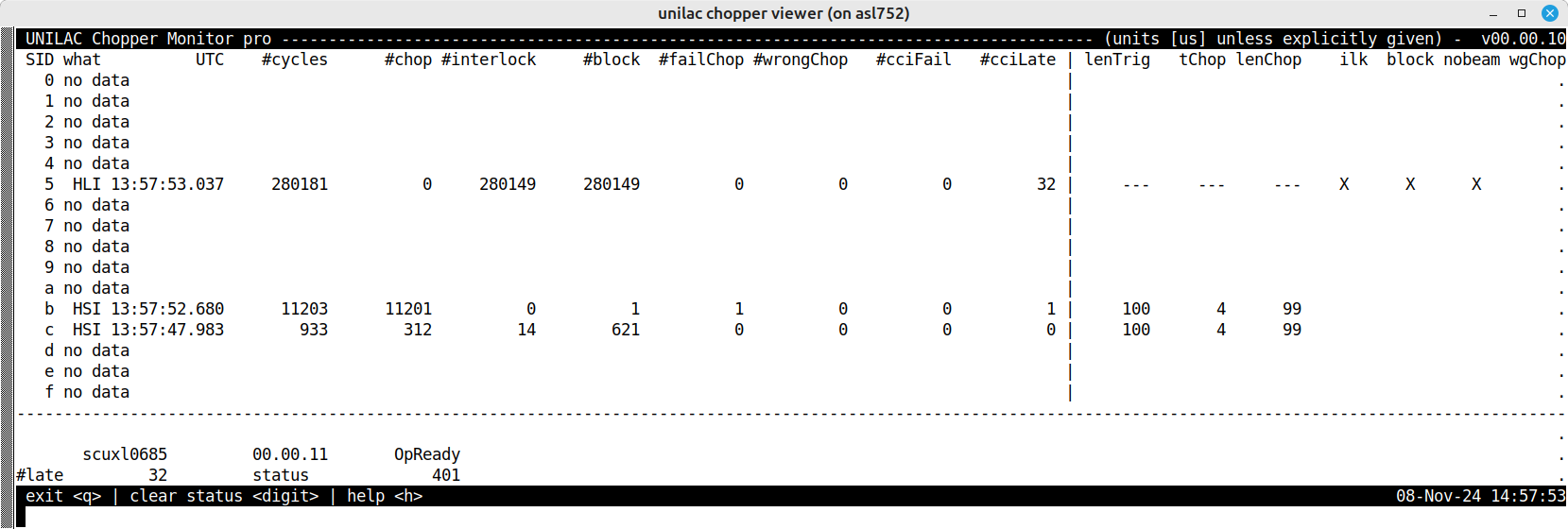 Figure: Screenshot of the UNILAC chopper monitor. The status is displayed for each Sequence ID ('virtual accelerator') 0..15. Details see text.
The figure above shows an example of the chopper monitor. The status is given for each Sequence ID (previously known as 'virtual accelerator') separately. Information is only given, if the the Sequence / virtual accelerator is actually executed. If the data is older than a certain time span (~ one hour) it is removed from the display.
Figure: Screenshot of the UNILAC chopper monitor. The status is displayed for each Sequence ID ('virtual accelerator') 0..15. Details see text.
The figure above shows an example of the chopper monitor. The status is given for each Sequence ID (previously known as 'virtual accelerator') separately. Information is only given, if the the Sequence / virtual accelerator is actually executed. If the data is older than a certain time span (~ one hour) it is removed from the display.
Display
Identification- SID: Sequence ID
- what: HLI or HSI chopper
- UTC: time of most recent execution [UTC]
- #cycles: number of cycles
- #chop: number of executed chops
- #interlock: number cycles where the chopper was disabled due to an interlock; here, 'interlock' means a slow interlock via (mini-)masp.
- #block: number of cycles where the chopper was disabled due to 'blocked' beam; here, 'blocked' means that the beam should not be executed (disabled in the BSS App or other reasons)
- #failChop: number of cycles where the copper was expected to chop, but it didn't (N.B. as the monitor does not take into account the experiment request to the chopper control, cycles where there was no chopper pulse due to a missing request from the respective target are counted as fail)
- #wrongChop: number of cycles where the chopper was not supposed to chop, but it DID chop
- #cciFail: number of cycles where no set-values have been received from the Chopper Control Interface FESA class
- #cciLate: number of cycles where the set-value from CCI FESA class have been received too late
- lenTrig [us]: measured length of the trigger signal at the output of the chopper control hardware; this value should correspond to ParamModi -> Tab 'UNILAC: Modi' -> 'Strahlpulslänge'
- tChop [us]: measured 'time' of the rising edge of the chopper signal; 'time' is relative to the rising edge of the trigger signal and has a value in the one-digit microseconds range
- lenChop [us]: measured length of chopper pulse and should have the same value as 'lenTrig'
- ilk: chopper disabled due to interlock signal detected by mini-MASP
- block: chopper disabled
- nobeam: UNILAC cycle is executed and the 'no beam' flag is set in the timing messages received from the Data Master (when the no beam flag is set also the block bit should be set)
- wgChop: wrong chopper - chopper has been opened although it was not supposed to
User Control
- '0..9, a..f': The statistics information is aggregated by the server program on the frontend. Thus, all monitor applications display the same information everywhere. The statistics can be reset for each Sequence / virtually accelerator individually. By pressing the relevant key 0..f, the information on the server program is reset. With the next execution, the data is reset for all monitor applications.
- h: display help text; basically, the URL of this wiki page is displayed
- q: quits the monitor application
Command Line Interface
A command line interface provides additional information
ruth@scuxl4711:~# unichop-ctl dev/wbm0 diag
common: diags ...
firmware boot at : 2024-11-12 14:44:09 TAI
diagnostics reset at : 2024-11-12 14:44:18 TAI
version : 000012
mac : 0x00267b00074c
ip : 192.168.161.167
used shared mem [byte] : 432
state (# of changes) : OpReady (0)
# of transfers : 000000000000
# of injections : 000000000000
status of act transfer : 0x0
# late events : 000000000045 // number of late events; most likely these are events by the FESA class delivered through saftlib
'offset done' (processing time) [us]: 96805.548 // this large value indicates a malfunction (saftlib, FESA); usually a value < 350us is expected
communication latency [us] : 96804.372 // this large value indicates a malfunction (saftlib, FESA); usually a value < 5us is expected
sum status (# changes) : 0x401 (45)
overall status : OK
status bit is set : error 10, late timing message received
status bit is set : error 10, late timing message received
unichop: info ...
MIL Device (0: piggy, 1..: SIO N) : 1 // here: SIO in slot #1
# of MIL transactions : 23696544
# of MIL communication errors : 0
# of events received : 7898893 // number of events from the FESA class, expected rate is 50 Hz
Usage
All communication to and from the firmware is implemented via the ECA - using timing messages. Documentation is available via the command line help.
ruth@scuxl4711:~# unichop-ctl dev/wbm0 -h
Usage: unichop-ctl [OPTION] <etherbone-device> [COMMAND]
-h display this help and exit
-e display version
-i show chopper information
All following parameters are to be used with command 'configure'
-w <MIL device> MIL device for sending MIL messages; 0: MIL Piggy; 1..: SIO
configure command requests state change from IDLE or CONFIGURED -> CONFIGURED
startop command requests state change from CONFIGURED -> OPREADY
stopop command requests state change from OPREADY -> STOPPING -> CONFIGURED
recover command tries to recover from state ERROR and transit to state IDLE
idle command requests state change to IDLE
diag shows statistics and detailed information
cleardiag command clears FW statistics
Use this tool to control (some) properties of the UNILAC chopper from the command line
Example:
'unichop-ctl dev/wbm0 -w1 configure'
'unichop-ctl dev/wbm0 startop'
'unichop-ctl dev/wbm0 diag'
For testing and debugging timing messages can be sent / received via saftlib
GID:
0xff0: group for local timing messages that are sent TO the lm32 firmware
0xff1: group for local timing messages that are sent FROM the lm32 firmware
EvtNo:
0xfa0: host -> lm32 : write strahlweg and anforder data
0xfa1: host -> lm32 : read strahlweg and anforder data
0xfb0: host -> lm32 : standard MIL write
0xfb1: host -> lm32 : standard MIL read
0xfc2: WR -> lm32 -> host: actual chopper readback data HLI
0xfc3: WR -> lm32 -> host: actual chopper readback data HSI
Examples: write/read host<->lm32<->MIL<->chopper unit:
saft-ctl tr0 -p inject 0x1ff0fa0000000000 0x0000000ab00ff0001 0
write strahlweg and anforder data to HW ^^^^ : strahlweg_register
^^^^ : strahlweg_maske
^^^^ : anforder_maske
saft-ctl tr0 -p inject 0x1ff0fa1000000000 0x0000000000000000 0
read strahlweg and anforder data from HW
Example: receive strahlweg data read from chopper unit:
saft-ctl tr0 -x snoop 0x1ff1fa0000000000 0xffffff0000000000 0
tDeadline: 0x17f6e1ba6fe69830 EvtID: 0x1ff1fa1000000000 Param: 0x0000000000ff0001
GID data received from lm32: ^^^
EvtNo read strahlweg data : ^^^
value of anforder maske : ^^^^
value of strahlweg maske : ^^^^
value of strahlweg register : ^^^^
Example: MIL bus diagnostic (here: write of 'strahlweg maske'):
saft-ctl tr0 -x snoop 0x1ff1fb0000000000 0xffffff0000000000 0
tDeadline: 0x17f6e1582eb79100 EvtID: 0x1ff1fb0000000000 Param: 0x00010160096200ff
GID data received from lm32: ^^^
EvtNo MIL write : ^^^
MIL error code : ^^^^
SIO slot : ^^
MIL ifb addr : ^^
module addr : ^^
submodule addr : ^^
data : ^^^^
Examples: standard MIL write/read host<->lm32<->MIL<->MIL device
saft-ctl tr0 -p inject 0x1ff0fb0000000000 0x000000600013cafe 0
write value to IFA echo register ^^^^: data
^^ : register
^^ : module addr, 0: IFA
^^ : MIL ifb addr
saft-ctl tr0 -p inject 0x1ff0fb1000000000 0x0000006000890000 0
read value fom IFA echo register ^^^^: reserved
^^ : register
^^ : module addr, 0: IFA
^^ : MIL ifb addr
saft-ctl tr0 -x snoop 0x1ff1fb1000000000 0xfffffff000000000 0
tDeadline: 0x17f6e324b8b808c0 EvtID: 0x1ff1fb1000000000 Param: 0x000101600089cafe
GID data received from lm32: ^^^
EvtNo MIL read : ^^^
MIL error code : ^^^^
SIO slot : ^^
MIL ifb addr : ^^
module addr : ^^
submodule addr : ^^
data : ^^^^
Example: read version of 'logic module 1' in chopper unit via standard MIL
saft-ctl tr0 -p inject 0x1ff0fb1000000000 0x0000016009660000 0
read value from MIL ^^ : SIO slot
^^ : MIL ifb addr
^^ : module addr
^^ : submodule addr
saft-ctl tr0 -x snoop 0x1ff1fb1000000000 0xfffffff000000000 0
tDeadline: 0x17f6e3999a40d0d8 EvtID: 0x1ff1fb1000000000 Param: 0x0001016009660014
version: ^^^^
Example: write and read chopper unit 'strahlweg register' via standard MIL
saft-ctl tr0 -p inject 0x1ff0fb0000000000 0x00000060096007ff 0
write value ^^^^: data
^^ : submodule addr
^^ : module addr
^^ : MIL ifb addr
saft-ctl tr0 -p inject 0x1ff0fb1000000000 0x0000006009600000 0
read value ^^^^: reserved
^^ : submodule addr
^^ : module addr
^^ : MIL ifb addr
Example: actual chopper readback data for HSI
saft-ctl tr0 -x snoop 0x1ff1fc3000000000 0xfffffff000000000 0
tDeadline: 0x17ff97ecad3b9ad0 EvtID: 0x1ff1fc3000900000 Param: 0x01f4000001f401f4
^ :
bpid bit 0,1: 0x0, 2: block, 3: interlock, 4: CCI received, 5: CCI late
measured length of chopper pulse : ^^^^
measured time of chopper falling edge: ^^^^
measured time of chopper rising edge : ^^^^
measured time of ctrl falling edge : ^^^^
NB: value 0x7fff: no data; 0xffff invalid data
Report software bugs to <d.beck@gsi.de>
Version 00.00.12. Licensed under the LGPL v3.
NFS-Init
Configuration of the frontend is done via nfs-init. Example for PRO:[me@asl789 scuxl4711]$ ll total 4 lrwxrwxrwx 1 me bel 29 Oct 18 17:48 20_unichop_unichop-tools -> ../global/timing-rte-db-yocto // tools lrwxrwxrwx 1 me bel 29 Oct 18 17:49 30_unichop_unichop-pro-lsb6-config -> ../global/timing-rte-db-yocto // launch and config firmware lrwxrwxrwx 1 me bel 29 Oct 18 17:49 40_unichop_unichop-pro-lsb6-systemd -> ../global/timing-rte-db-yocto // launch monitoring server -rwxr-xr-x 1 person bel 88 Nov 6 17:11 51_fesa // launch FESAExample for INT, note the differences in the names of the symbolic links (click):
[me@asl789 scuxl4712]$ ll
total 4
lrwxrwxrwx 1 me bel 29 Oct 18 17:48 20_unichop-dev_unichop-tools -> ../global/timing-rte-db-yocto // tools
lrwxrwxrwx 1 me bel 29 Oct 18 17:49 30_unichop-dev_unichop-int-lsb6-config -> ../global/timing-rte-db-yocto // launch and config firmware
lrwxrwxrwx 1 me bel 29 Oct 18 17:49 40_unichop-dev_unichop-int-lsb6-systemd -> ../global/timing-rte-db-yocto // launch monitoring server
^^^^ ^^^ ^^^^
| | |- location
| |- environment
|- path
-rwxr-xr-x 1 person bel 88 Nov 6 17:11 51_fesa // launch FESA
Code, Build, Deployment
Code is here:bel_projects/tree/.../modules/uni-chop
For branch and hash of the current version check the logbook
For building and deployment check the comments given at the top of the 'Makefile'
Example for building and deployment for PRO (assuming target system runs Yocto ramdisk)
make clean // clean make ENV=pro SYSENV=YOCTO PREFIX= all // builds software, firmware and generate nfs-init scripts make PREFIX= SYSENV=YOCTO STAGING=/common/export/timing-rte/unichop deploy // copies stuff to location where nfs-init will find it-- DietrichBeck - 14 Nov 2024


| I | Attachment | Action | Size | Date | Who | Comment |
|---|---|---|---|---|---|---|
| |
chopper-monitor.png | manage | 77 K | 2024-11-14 - 10:53 | UnknownUser | chopper monitor |
{kind=link}
Please login to edit this topic
Topic revision: r5 - 2025-07-17, TobiasHabermann
Ideas, requests, problems regarding GSI Wiki? Send feedback | Legal notice | Privacy Policy (german)